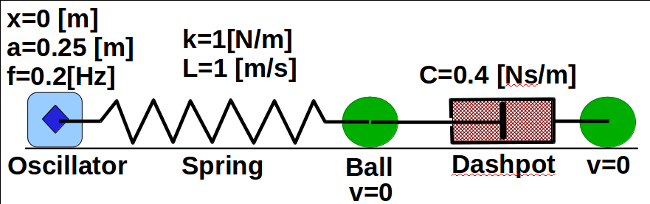
Figura A: Una Configuración Posible
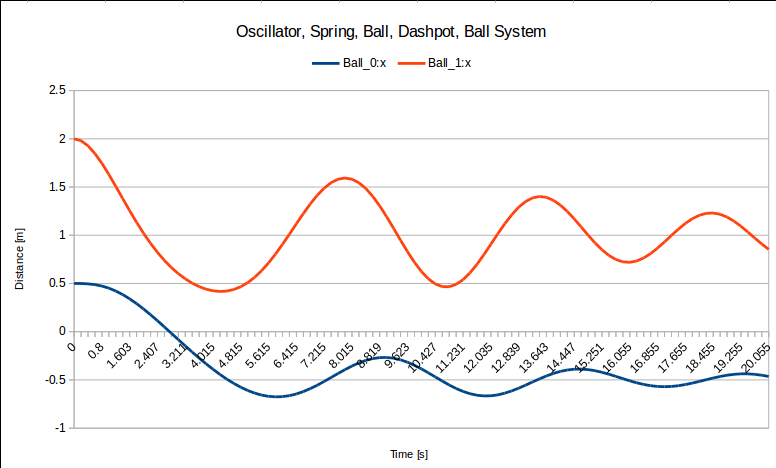
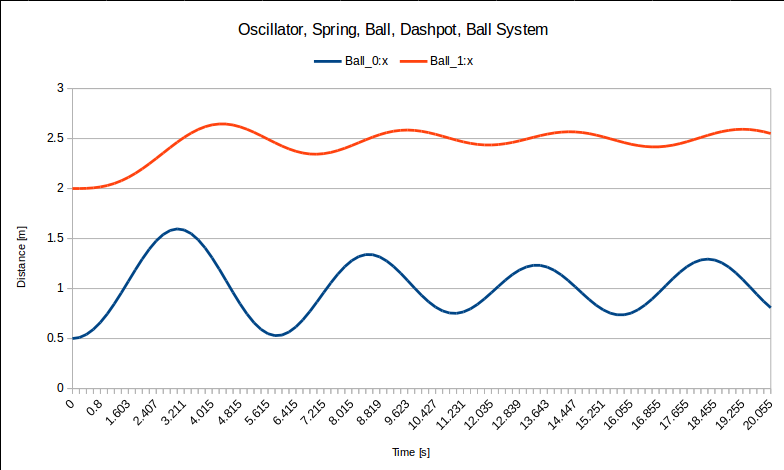
Figura B: Posición bolas en el tiempo para la configuración de Figura A: La figura
superior no corresponde exactamente al escenario de la izquierda, la de abajo sí.
Figura A: Una Configuración Posible |
Figura B: Posición bolas en el tiempo para la configuración de Figura A: La figura superior no corresponde exactamente al escenario de la izquierda, la de abajo sí. |