y completar lo que sea necesario para correr PhysicsLab.cpp proporcioando para esta etapa.
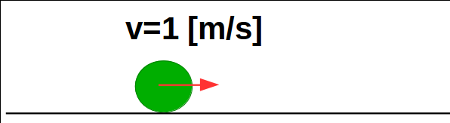
Figura 1: Bola con movimiento rectilineo uniforme.
Para evidenciar que su programa
funciona bien, en la documentación su grupo debe presentar una gráfica
x v/s t para la posición de la bola en el tiempo para los primeros 5
segundo.
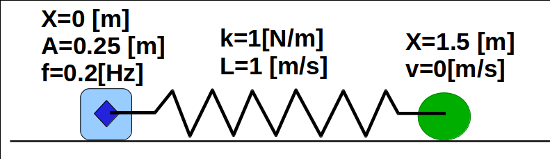
Segunda Etapa
Como segundo paso, complete el
código con la clase resorte
(Spring) de manera que el nuevo PhysicsLab.cpp refleje la configuración de la Figura 2.
Figura 2: Dos bolas acopladas por un resorte. Se muestra estado
inicial.
Para
evidenciar el funcionamiento de esta etapa, en la documentación
presente la figura 2 y una gráfica x v/s t para la posición de la bola
izquierda.