Proyecto
“Simulación de un
Sistema domótico en
Python”
Integrantes: → Tomas Ibaceta Rol: 201721039-7
→ Patricio Carrasco Rol: 201721064-8
→ Gustavo Silva Rol: 201721012-5
Ramo: →
[ELO330] Programación de Sistemas
Fecha: → 14 – 12 – 2021
Contexto: → Se ha observado la
necesidad de registrar datos en la nube es una necesidad común, debido al
acceso remoto que logra. Dentro de este tópico es que alumnos del ELO330 de la
UTFSM han desarrollado previamente una solución simplificada a este problema
(Tarea 2 – ELO330 – 2021S2), es debido a ello que; se han planteado replicar el
sistema medición en un nuevo lenguaje, este corresponde a Python. Este cambio
del lenguaje es debido a que este ha estado en auge en el ultimo tiempo, debido
a su nivel de abstracción de alto nivel que ofrece a sus usuarios y
programadores.
De ello se
establece la siguiente problemática, ¿Como puedo crear una arquitectura cliente/servidor
en lenguaje de Python que sea concurrente?
De esta
manera se plantea la siguiente estructura de programa que se comunicara
mediante TCP/UDP con programas del mismo lenguaje (python); todos evidenciable
en el siguiente diagrama.
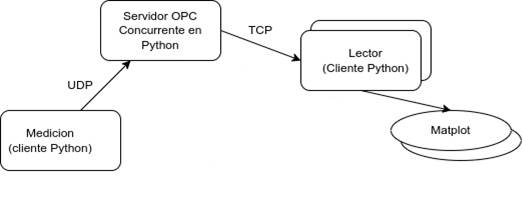
Figura 1: Diagrama de arquitectura de solución
En la figura 1 se puede
observar de la grafica que existe un servidor OPC, este es el encargado de
emular el servidor en la nube, administrando conexiones TCP con los distintos
clientes y UDP con el único sensor que estamos observando. Es importante
recalcar que hay distintas formas de realizar un servidor concurrente, uno de
ellos corresponde a simularlo a través de la estructura select.
Por otra parte, de la
misma grafica se observa el programa Medicion.py, este es el encargado de crear
una rampa de periodo 1 amplitud 1, enviando los valores de esa señal cada delta_t
[s] a opc.py mediante una conexión UDP.
Finalmente observamos un
cliente, que corresponde al programa lector escrito en Python este se comunica
mediante TCP con opc para leer el valor de un único sensor; logrando graficar a
través de utilizar una librería llamada matplotlib junto con un
buffer circular.
Estrategia y Solución
para resolver Problema:
Medidor.py:
La función de este programa
es crear un socket UDP y mandar datos periódicamente de una función
determinada, para este caso son dientes de sierra de 50% de ciclo de trabajo.
La estrategia que se
toma es pasar el nombre de hostname , puerto a usar en aragorn
y el valor de delta t por argumentos al correr el ejecutable del
programa; guardando cada una de las variables en el formato que corresponde.
Una vez teniendo las variables se procede a crear el socket para UDP :
sock = socket.socket(socket.AF_INET,
socket.SOCK_DGRAM)
y luego guardando las direcciones del server en
la estructura sockaddr_in como son el puerto en el que trabaja y su
dirección de red (variables que se pasan al ejecutar el programa) .
Luego en un while(1) se generan constantemente
valores de números flotantes de la función de diente de sierra y estos son
mandados a través de la función sendto con dirección al server guardado en
la estructura sockaddr_in :
sendData =
str.encode(str(num))
sent = sock.sendto(sendData,
server_address)
lector.py:
De igual forma que medidor.py
la información del servidor opc.c se pasa por argumentos cuando se
ejecuta el programa lector.py ( hostname , numero de puerto aragorn y delta
) . Se almacena el hostname en una tupla junto con el puerto a usar, luego
se crea el buffer para almacenar los 20 datos que corresponde con un arreglo de
flotantes.
Finalmente, para
comunicarse con el servidor opc dentro de un while infinito hasta que se usa la
señal SIGINT; se crea el socket con el número del Puerto del servidor y
se crean objetos para la comunicación entre servidor y cliente gracias a las
funciones que posee el socket en python, como lo son los métodos recv que permite leer datos que le manda el
servidor y el otro método es send que permite mandar datos al servidor.
Luego, se vuelve a realizar la conexión del socket con el método connect; para así mandar el carácter ´n´ para
advertir al servidor que envíe datos a este cliente y este mismo almacena de a
20 datos en un buffer circular el cual dará paso al gráfico.
Para plotear ocupa la
siguiente estructura:
fig = plt.figure()
…
fig.clear()
ax = plt.subplot()
ax.plot(np.asarray(xValues), np.asarray(yValues), linewidth=2.0)
plt.pause(0.02)
plt.show()
Lector ocupan un buffer
circular para ordenar los datos que se caracteriza por ser FIFO,
es decir; cada vez que llega una nueva medición se agrega al final del buffer
de 20 datos, pero para ello deben eliminar el primer dato del buffer a través
del método pop y agregar al final del buffer con el método append
opc.py:
Para el servidor solo
se necesita como argumento el número de puerto en el que se desea trabajar,
gracias a las características que posee un socket se puede trabajar con UDP y
TCP en el mismo socket sin ningún tipo de problema, por lo que se crean los 2
socket :
socket_TCP = socket.socket(socket.AF_INET,
socket.SOCK_STREAM)
socket_UDP =
socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
y haciendo el bind correspondiente a cada uno, con la dirección del
servidor almacenada en la estructura de tipo sockaddr_in. En el loop infinito realizado con while(isfinish
== False) (con condiciones de excepción para finalizar con ctrl
+C) se utiliza la función select() con un time out de
1 segundo para emular un servidor concurrente, de esta manera solo revisara las
acciones de TCP o UDP si es que hubo movimiento en alguno de ellos. Si es que
esto último sucede primero se analiza si el movimiento fue en una conexión TCP
y si tiene que mandar los datos a un cliente en específico; y luego analiza si
el movimiento fue en alguna conexión UDP para almacenar datos que llegan desde
el medidor (que en algún momento puede ser enviado por la conexión TCP del
socket al cliente que lo solicitó).
Es importante recalcar
que el select funciona muy similar a como funciona en c, en este caso ya
retorna 3 listas:
read_lists, write_list,
exception_list = select.select(socket_lists_rd, socket_lists_rd,
socket_lists_rd, timeout)
donde en cada lista, ya
se encuentran los descriptores de socket en que solamente hubo movimientos.
Situaciones
problemáticas del programa:
Una de las situaciones
problemáticas que ocurren el programa es que el medidor siempre genera una
función de periodo 1 segundo, ya que nunca se indica que este cambie por lo que
si se elige un delta muy grande lo más probable es que la gráfica realizada por
el cliente lector no se distinga como corresponde además de que esta lee cada
un segundo lo cual ocasiona que no se forme la señal como uno desee.
Conclusiones:
Es importante recalcar
que este código se basa en una solución ya propuesta con anterioridad en una evaluación
del curso ya mencionado. Esto hace que sea importante hacer notar una característica
de este proyecto: “este proyecto se basa en una traducción de código”; lo cual
no desmerece su desarrollo, esto dice que un lenguaje de alto nivel como python,
puede reducir mucho lo que es código, pero el nivel de abstracción produce que
se puedan perder detalles y eficiencia si es que no se entiende lo que se esta
realizando por debajo; lo cual se consigue entendiendo como realizar el mismo código
en lenguajes como C.
Además, este proyecto
tiene muchas posibles mejoras, una de ellas es considerar y evaluar el
comportamiento con versiones de estos programas en lenguajes diferentes a
python. Por otra parte se puede reestructurar la solución para que se realice
con multi-hebra.