Levitador Magnético
Diagrama de Bloques
Estabilización del rotor a diferentes distancias
Memoria realizada por Héctor León, Mayo 2016
Estrategia de Control de Razón, Control PID en PLC y Supervisión HMI en PC |
Memoria realizada por Ricardo Villarroel, Marzo 2014
Inspección, clasificación, localización y traslado de objetos |
Memoria realizada por Matías Aguirre, Diciembre 2013
Seguimiento de trayectorias con evasión de obstáculos |
Memoria realizada por Itrick Klenner, Septiembre 2013
Levantamiento Forzado |
Auto-levantamiento |
Memoria realizada por Jorge Soto, Agosto 2013
Movimiento en línea recta |
Movimiento angular |
Memoria realizada por Julián Martínez, Marzo 2013
Panel Frontal |
Cuadrado |
Perturbación |
Memoria realizada por Daniel Spataris, Noviembre 2012
Frenado electromagnético |
Memoria realizada por Pablo Ahumada, Octubre 2012
Control PD |
Control PID |
Memoria realizada por Nicolás Kunakov y Daniel Olmos, Diciembre 2011
Posicionamiento |
Panel Frontal |
Memoria realizada por Jorge Cápona, Noviembre 2011
Estabilización |
Memoria realizada por José Avendaño, Septiembre 2011
Soldadura adaptiva - rectángulo |
Soldadura adaptiva - tolva |
Memoria realizada por Pablo Salazar y Gino Torres, Noviembre 2009
Trazado adaptivo - rectángulo |
Trazado adaptivo - triángulo |
Nicolás Montoya, Noviembte 2009
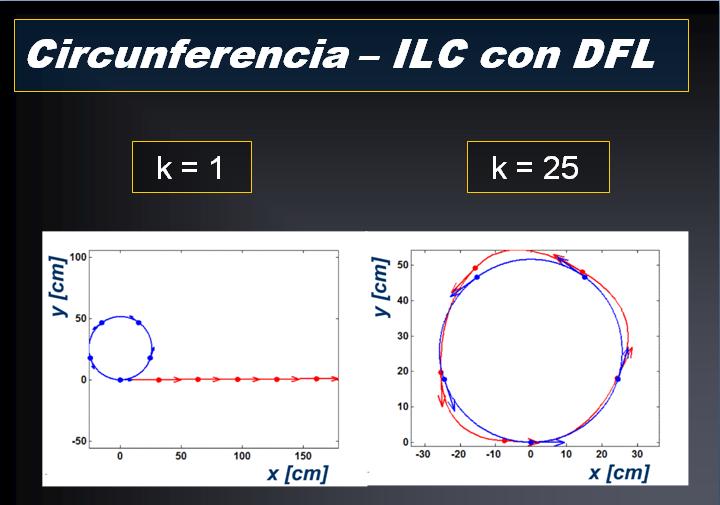
Seguimiento de trayectoria circular |
Francisco Villagrán, Octubre 2009
Estabilización de la bola sobre la barra |
Gonzalo Silva, Septiembre 2008
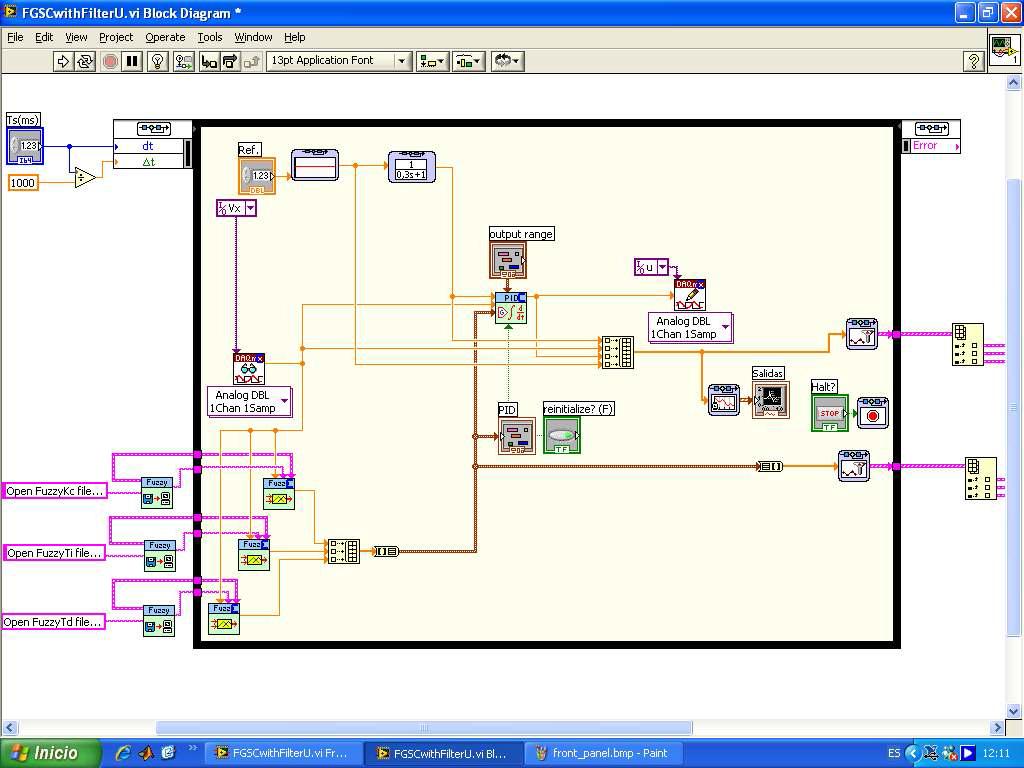
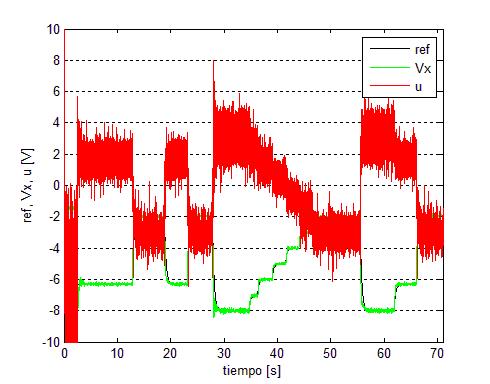
Levitador Magnético |
Diagrama de Bloques |
Estabilización del rotor a diferentes distancias |
|
|
|
Danny Donoso, Enero 2008
Estabilización de la bola sobre la barra |
José Manuel Ortíz, Diciembre 2007
Seguimiento Trayectoria Cuadarada |
Seguimiento Trayectoria Circular |
Seguimiento Trayectoria Cuadrada |
Josey Avilés, Diciembre 2007
Estabilización de la bola sobre la rueda |
Eduardo Toro, Marzo 2007
Sin control |
Con control de acercamineto y estabilización |
Juan Espoz, Febrero 2007
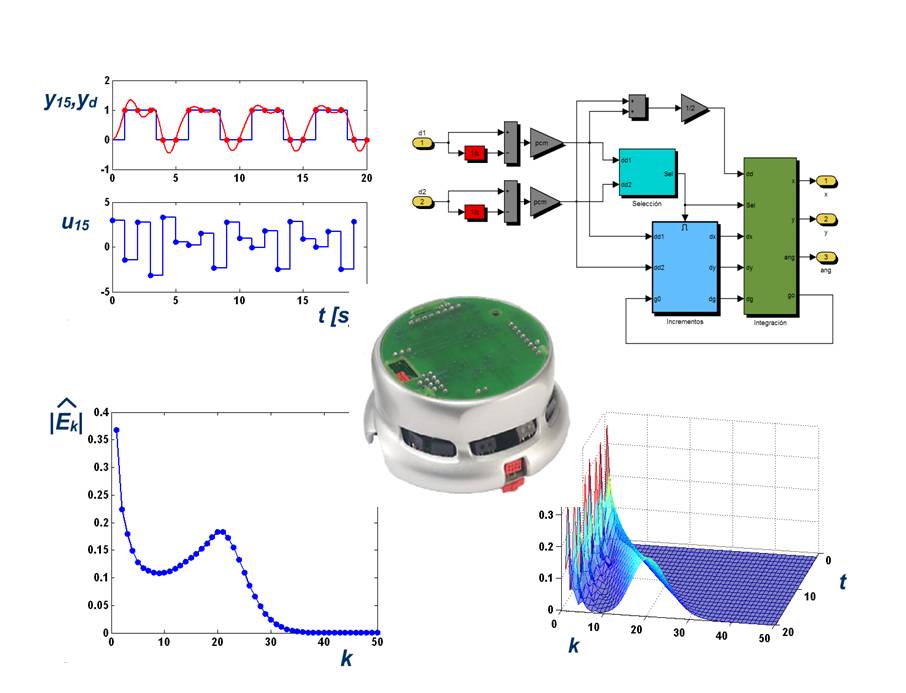
Seguimiento de trayectorias de la bola sobre la plataforma por apreendizaje iterativo |
Iván Vega, Enero 2006
Sistema embebido de extracción por microndas |
Marcelo Barría, Julio 2005
Aprendizaje Iterativo |
Seguimiento de trayectorias por aprendizaje iterativo |
 |
 |
Claudia López, Junio 2005
Sistema embebido de evaporación en corriente de nitrógeno |
Jaime Urzúa, Noviembte 2002
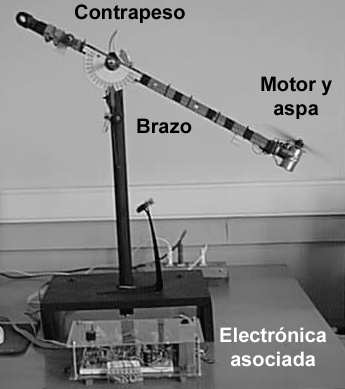
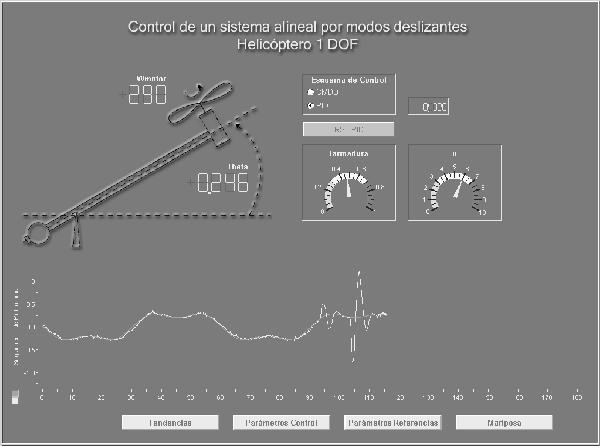
Péndulo invertido con rotor |
Levantamiento y estabilización |
 |
 |