Arquitectura de la solución
Creación de configuraciones
El programa permite la creación de configuraciones (que vendría siendo la definición de la estructura robótica a instalar) según el siguiente caso de uso:
| Actor (programador) | Sistema (aplicación) |
|---|---|
| 1. Abre la aplicación. | 2. Despliegue de la interfaz gráfica. |
| 3. Ingreso de las componetnes de la estructura a modelar. | |
| 4. Exportar la configuración apretando el botón "exportar". | 5. Generación de un archivo de texto con la configuración. |
Implementación de la configuración
Una vez creada la configuración esta se ejecuta según el siguiente caso de uso.
| Actor (programador) | Sistema (aplicación) |
|---|---|
| 1. Generación del programa que cumpla las tareas requeridas por la estructura. | 2. Implementación de las librerías generadas por Motion Structure para el manejo cinemático de la estructura. |
| 3. Ejecución de su propio programa con las librerías externas. |
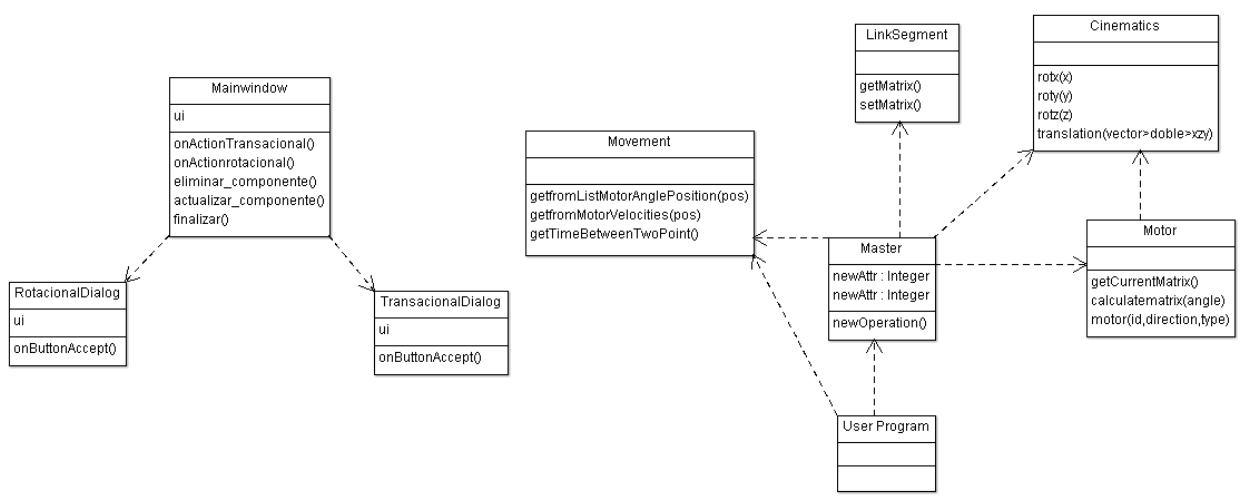
Diagrama UML