Diseño
y Programación Orientados a Objetos
1er. Sem 2018
Tarea 2: Aplicación Gráfica para Robots en Laberinto
Lea detenidamente la tarea. Si algo no lo entiende, consulte en clases.
Si es preciso, se incorporarán aclaraciones al final.
Objetivos de la tarea: * Manejar proyectos vía GIT.
* Crear Interfaces gráficas en Java.
* Manejar eventos de software.
* Ejercitar la creación y extensión de clases para satisfacer nuevos requerimientos.
* Ejercitar el patrón de diseño "Modelo-Vista-Controlador".
* Generar documentación usando Javadoc.
Descripción General
En esta tarea se pide crear una interfaz gráfica para el robot definido en la Tarea 1.
En la interfaz gráfica usted agregará algunas funcionalidades para
interactuar con la aplicación, por ejemplo, selecionando desde un menú
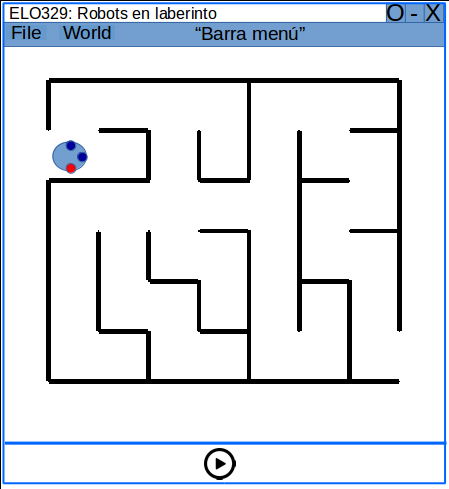
el archivo a utilizar como laberinto. La figura 1 muestra un ejemplo de
aplicación esperada luego de haber selecccionado un laberinto e
incluido un robot en ella. La interfaz gráfica del usuario incluye una
barra de menú, una zona de despliegue el mundo que incluye el laberinto
y uno o más robots en él y en la parte baja un botón para pausar o dar
continuidad al tiempo.
La barra menú contiene el menú File y World. Bajo el menú File el usuario tiene el ítem Open. Con Open
la aplicación pide al usuario seleccionar el laberinto a utilizar. Para
ello la aplicación hace uso de la clase JFileChooser. Bajo el menú
World se despliegan dos ítems: Create robot y Set delta t. La opción Create Robot
despliega una nueva ventana o sucesivas ventanas para pedir al usuario
definir la velocidad, la distancia de detección de sus sensores, tipo
de piloto para el robot y el nombre de archivo donde se registrará la
ruta si el usuario así lo quiere. Luego un robot es desplegado junto al
mouse y es liberado en el punto donde el usuario presiona el botón
izquierdo el mouse. Los robots son transparentes entre sí, luego pueden
pasar uno sobre otro. Cuando el usuario decide especificar un archivo
para registrar la ruta del robot, lo hace vía la clase JFileChooser.
Cuando es definido, el archivo registra una tabla de valores incluyendo
tiempo, posición x e y del robot por cada línea del archivo de
texto. Sólo se puede insertar nuevos robots cuando el tiempo está en
pausa. Cuando un robot sale del laberinto, no es importante por donde
se sigue moviendo. El programa termina cunado el usuario cierra la
ventan principal de la aplicación.
Figura 1: Ejemplo de interfaz gráfica esperada luego de haber seleccionado un laberinto e incorporado un robot
Desarrollo en Etapas
Para llegar al resultado final de esta tarea usted aplicará la metodología
"Iterativa e Incremental" para desarrollo de software. Su grupo irá
desarrollando etapas que irán abordando los requerimientos
gradualmente. En cada etapa usted obtendrá una solución que funciona
para
un subconjunto de los requerimientos finales. Su grupo deberá entregar
una solución para cada una de las etapas aún cuando la última integre
las primeras. Esto tiene por finalidad, educar en la metodología iterativa e incremental.
Primera Etapa: Ventana principal con menú File
Esta etapa se muestra la ventana principal de la aplicación con la
programación para leer el laberinto y su despliegue en la zona central
de la ventana. En la zona inferior debe mostrarse un botón play pausa que al
presionarlo cambia a pause play. En esta etapa el botón inferior no generará
más efecto que cambiar su vista. Una vez definido y desplegado el
laberinto, la venta principal debe redefinir su tamaño para mostrar todo
el laberinto en la zona central. La aplicación termina al cerrar la
ventana principal. Como ayuda siga los pasos del taller del 18.04.18.
Segunda Etapa: Inclusión de menú World con creación de robot predefinido
En esta segunda etapa se incluyen los dos ítems para el menú World. El ítem Set delta t define el incremento discreto para el tiempo; sin embargo, el tiempo aún no será activa con el botón Play.
El ítem Create Robot hará aparecer un robot en una posición fija con
velocidad (orientación) también predefinida. El tipo de piloto
(estrategia de navegación) no es relevante en esta etapa.
Tercera Etapa: Creación de varios robots definidos parametrizados por el usuario
Además de la etapa previa, al crear un robot, el usuario puede
ahora definir su velocidad y el tipo de piloto (estrategia apegado a
pared derecha o apegado a pared izquierda). No se pide ofrecer opción
de registrar la ruta seguida. Luego de definir el piloto, se crea un
robot movible junto al mouse, al presionar el botón izquierdo el mouse
el robot es liberado. Luego usando el botón Play y Pause el usuario observa la ruta seguida por el robot. Al pausar el avance de robot, el menú World permite la creación de nuevos robots. La vista de cada sensor debe cambiar de color cuando detecta una pared cercana.
Cuarta Etapa: Registro de trayectoria
En esta última etapa el
programa permite definir un archivo de salida para cada robot. En éste
el robot registra suposición conforme el tiempo avanza. Los momentos de
pausa no son reflejados.
Resultados Esperados de su Grupo
Usted deberá documentar, usando notación "JavaDoc" las clases Robot y RobotView de su última etapa.
Prepara un archivo makefile
para compilar y ejecutar su tarea en aragorn. Además incluya rótulos
"clean" para borrar todos los .class generados, y "doc" para generar la
documentación en directorio "documentation".
Entregue todo lo indicado en Normas de Entrega de Tareas. Su documentación automática con javadoc debe ser generable con:
$ make doc
Para que esto funcione usted debe incluir el rótulo doc en su archivo makefile. (OJO
no incluya las páginas html generadas por javadoc, éstas serán
generadas por este comando cuando el ayudante revise su trabajo)
En su archivo de documentación (pdf o html) incorpore el diagrama de
clases de la aplicación. Éste lo puede generar con jgrasp u otro
programa.
Extra créditos
Su grupo puede aspirar a 5 puntos
adicionales (la nota
igualmente se satura en 100%) si además de registrar la trayectoria,
cada robot genera un archivo con el laberinto y su trayectoria en él.
En archivo Readme indique si abordó
este requerimiento.
Ayudas * Revise las instrucciones para la realización de tareas.
* 18.04.18: Para ajustar el tamaño de un JFrame, usted puede invocar el método pack
de Window (clase de la cual JFRame hereda). Para componentes gráficas
dentro de un JFrame, usted puede consultar por la Window que los
contine invocando getTopLevelAncestor().
* 18.04.18: Para cambiar el tamaño de un ImageIcon, considere su método
getImage que retorna una instancia de Image, ésta puede ser escalada y
luego usted puede invocar setImage de la clase ImageIcon.
* 26.04.18: A petición de un grupo que no logró terminar la tarea1, se comparte lo desarrollado por uno de los profesores de la tarea1.
* No dude en consultar al profesor o ayudantes sobre dudas de esta tarea.
Sobre la arquitectura Modelo Vista Controlador
Para organizar interfaces gráficas una "solución de software general recomendada" (éstas son conocidas como patrones
de diseño) es el "modelo-vista-controlador".
El modelo
es la clase que caracteriza a un objeto y almacena los datos
significativos de éste. Por ejemplo, en este caso la clase Robot maneja el modelo
de un robot, también las clases Dashboard, y DistanceSensor manejan el modelo para esas categorías de objetos. Por
otro lado tenemos las vistas,
estas clases indican cómo un objeto se muestra visualmente. Estas
clases representan visualmente los objetos del problema. En nuestro
caso Robot, Dashboard, y DistanceSensor poseen sus
vistas en las clases RobotView, DashBoard,
y DistanceSensorView. No es el caso de esta tarea, pero un
objeto podría tener varias vistas para sus datos; por ejemplo un objeto
termómetro tiene un modelo y podría tener varias formas de mostrarse:
como columna de mercurio, como número digital, como un color, etc.
Finalmente tenemos el controlador. Las clases
controladoras son aquellas que modifican los datos, por ejemplo a
través de las acciones del usuario en la interfaz. Generalmente las
clases controladoras son los "listeners" o manejadores de los eventos
que usted estima de interés. Una clase puede cumplir dos roles, por
ejemplo modelo y controlador. Así como podemos tener varias vistas, es
posible tener varias clases controladoras de un modelo. Otras clases
controladoras son el listener que responde a las opciones de selección
del menú y el listener que responde a los eventos del mouse cuando
presionamos sobre un botón.