Caso de Uso 1
Nombre: Ir a posición.
Propósito: Se desea mover el robot hacia una posición específica y conocer qué ángulos encontró el programa.
Actor: Usuario
Pre-Condición: Programa iniciado, el robot está esperando una instrucción.
Evento: El robot (simulado) se mueve hacia ese punto y el programa informa sobre los ángulos encontrados para los efectores.
Post-Condición: El robot queda esperando en la posición alcanzada.
Tipo: Manual
| Actor | Sistema |
|---|---|
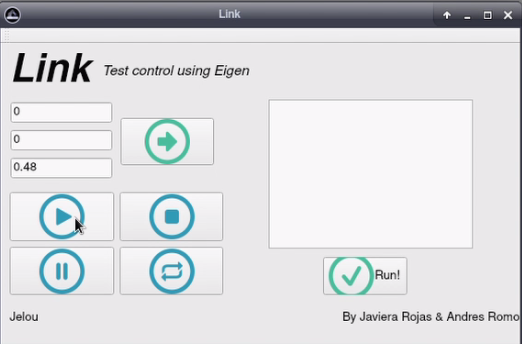
| 1)Usuario inicia programa y simulación (Boton Play) | 2)Inicia ventana del programa (VREP ya iniciado). |
| 3)Usuario Ingresa posición | 4)Robot esperando instrucciones |
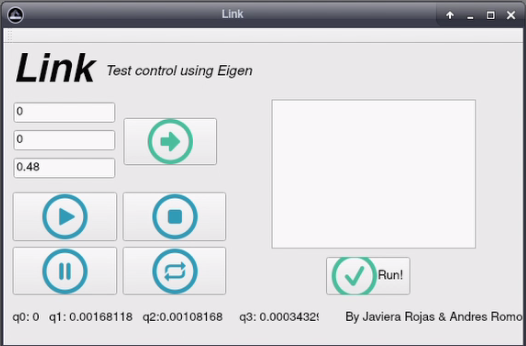
| 5)Usuario Presiona botón "get to" | 6)Programa encuentra los ángulos, los muestra y a través de API mueve el robot. |
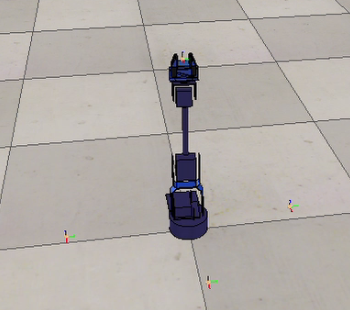
Se inicia programa y simulación (Boton Play)
Robot esperando instrucciones

Se ingresa posición

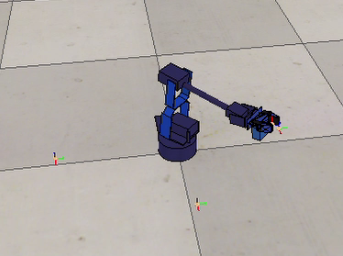
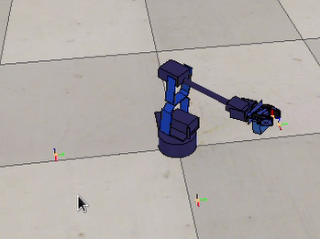
Robot llega a punto y queda esperando instrucciones
Caso de Uso 2
Nombre: Programar secuencia de movimientos.
Propósito: Se desea que el robot cumpla con una secuencia de movimientos.
Actor: Usuario.
Pre-Condición: Programa iniciado, el robot está esperando una instrucción.
Evento: El robot ejecuta cada instrucción en orden, moviendose a traves de varios puntos.
Post-Condición: El robot queda esperando en la posición alcanzada.
Tipo:
| Actor | Sistema |
|---|---|
| 1)Usuario inicia programa y simulación (boton play) | 2)Inicia ventana del programa (VREP ya iniciado). |
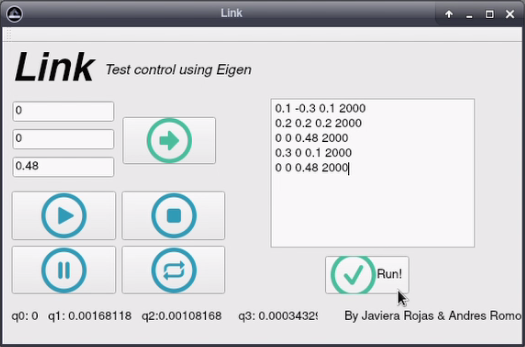
| 3)Usuario Ingresa secuencia de movimiento en casilla textbox | 4)Robot esperando instrucciones |
| 5)Usuario Presiona botón "run" | 6)Programa encuentra los ángulos, los muestra y a través de API mueve el robot y realiza la secuencia de movimientos. |
| 7)Robot queda esperando instrucciones. |
Se inicia programa y simulación (Boton Play)
Robot esperando instrucciones
Ingresa secuencia de movimiento y clickea en Run
Robot realiza la secuencia de movimientos. y queda esperando instrucciones

Caso de Uso 3
Nombre: Interactuar con el simulador.
Propósito: Se desea establecer control remoto del simulador Vrep a través de la interfaz creada.
Actor: Usuario.
Pre-Condición: Vrep debe ejecutarse desde su propia aplicación.
Evento: Se presiona alguno de los botones {start,pause,stop,connect}
Post-Condición: Vrep es controlado desde la aplicación de Link.
Tipo: Manual
| Actor | Sistema |
|---|---|
| 1)Usuario inicia programa | 2)Inicia VREP y el programa Link. |
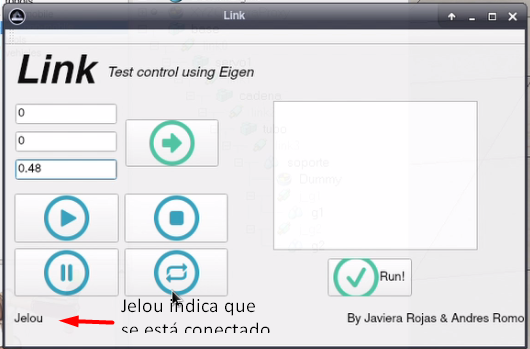
| 3)Usuario presiona boton "conectar" | 4)Sistema establece conexión utilizando la API |
| 5)Usuario interactua con el programa | 6)Sistema responde a usuario |
Se inicia VREP, click conectar, aparece "Jelou"