|
Como es de esperar la comunicación inalámbrica
fue hecha satisfactoriamente y aquí se muestran unos ejemplos de la
interpretación de los datos obtenidos.
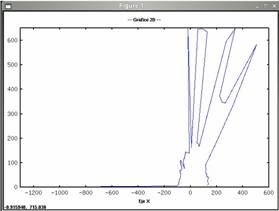
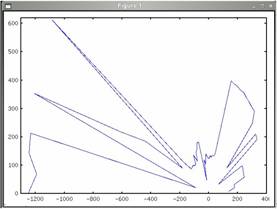
Para gráficos 2D, el funcionamiento de gráficos dos
es continuo, esto quiere decir que el grafico se actualiza una vez
que el robot haya hecho una nueva medida.
Para gráficos 3D, se observó la presencia de ruido
debido a la poca precisión de la precisión del sonar, para poder
observar los resultados con algo de más claridad, se hizo un programa
en MatLab que toma la matriz y la hace
pasar por un filtro de mediana, reduciendo así el ruido. En este
caso, el robot tenía un objeto que le tapaba la visión del lado
izquierdo.
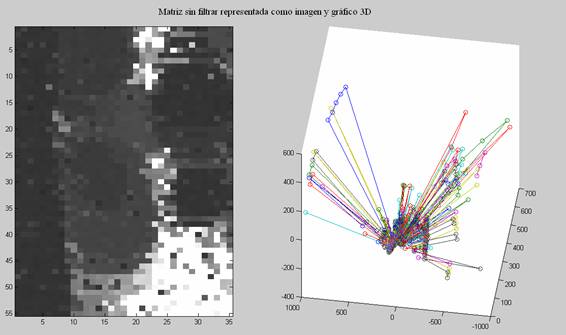
Matriz sin filtrar representada
como imagen y gráfico 3D
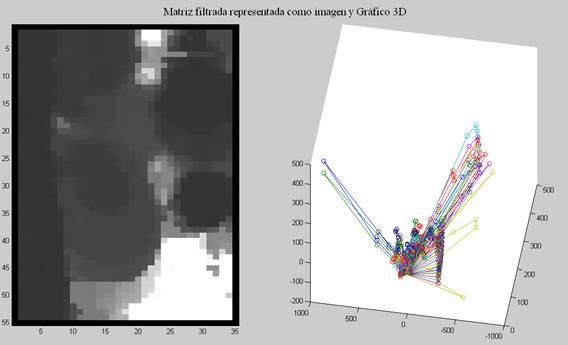
Matriz filtrada representada como
imagen y gráfico 3D
|